Reads the digital value one the defined port. These are exposed as TinkerKit connectors on the robot. See the diagrams below for pin locations
Robot.digitalRead(portName)
port: Valid names are TK0 to TK7 (found on the Control board), TKD0 to TKD5 (on the Control board), and B_TK1 to B_TK4 (on the Motor Board).
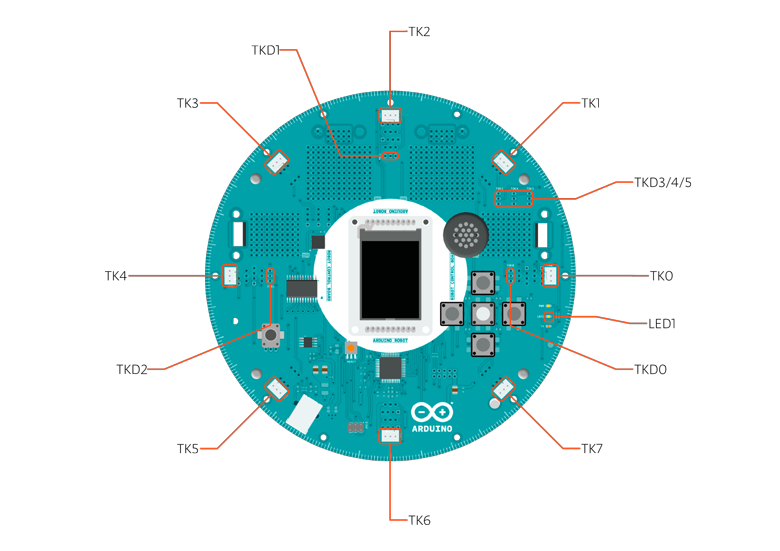
Control Board
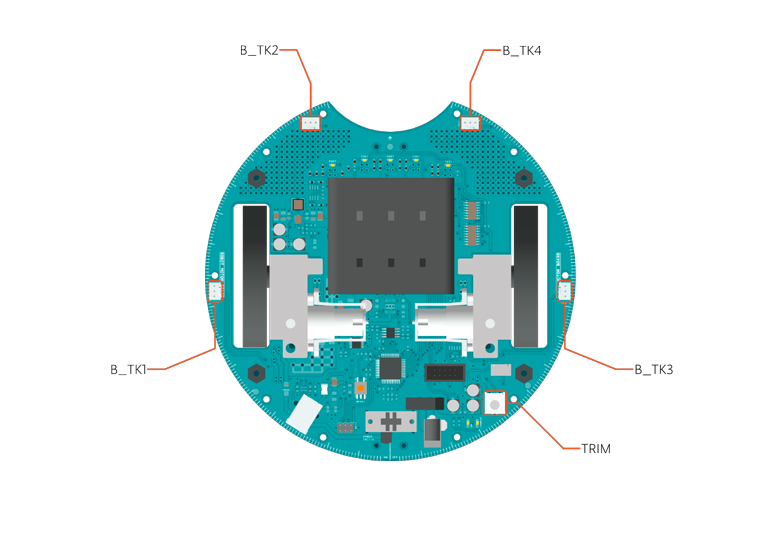
Motor Board
Control Board
Motor Board
The text of the Arduino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.