Reads the value from the specified port on the robot. The ports are exposed on the robot as TinkerKit connectors.
The board has a 10-bit Analog to digital converter. This means that it will map input voltages between 0 and 5 volts into integer values between 0 and 1023.
Robot.AnalogRead(port)
port: TK0 to TK7 (found on the Control Board), TKD0 to TKD5 (found on the Control Board), or B_TK1 to B_TK4 (found on the motor Board)
int : 0 to 1023
If the input port is not connected to anything, the value returned by Robot.AnalogRead() will fluctuate based on a number of factors (e.g. the values of the other Analog inputs, how close your hand is to the board, etc.).
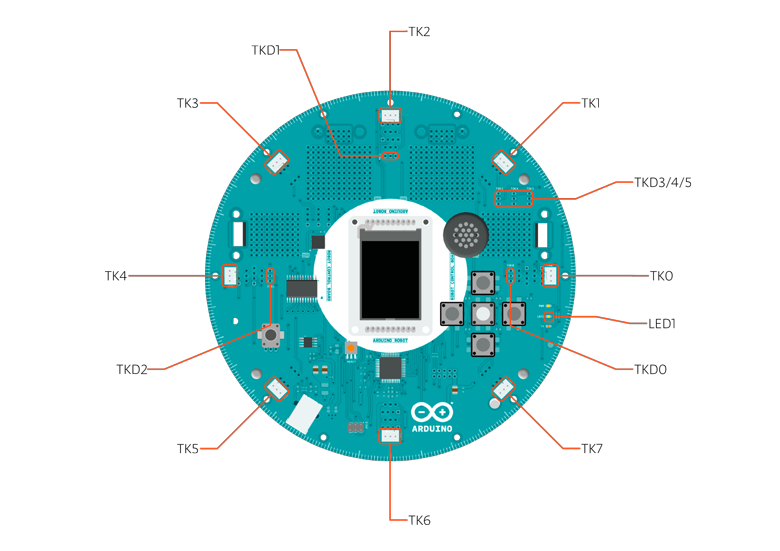
Control Board
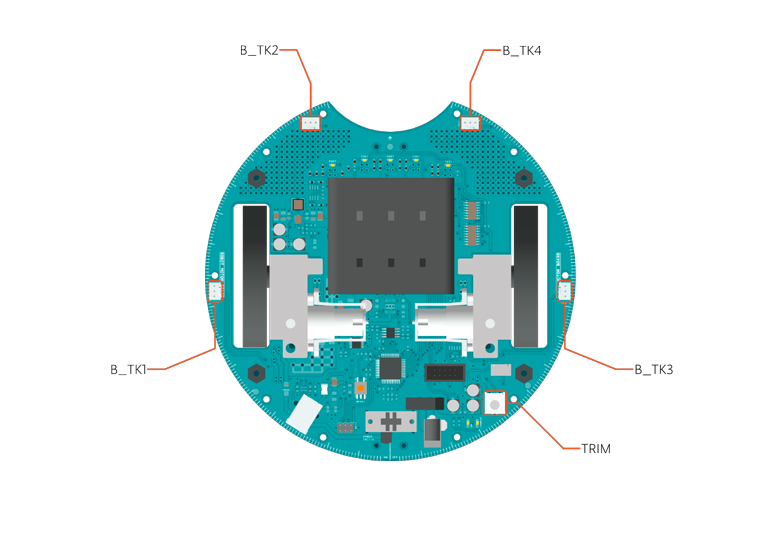
Motor Board
The text of the Arduino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.